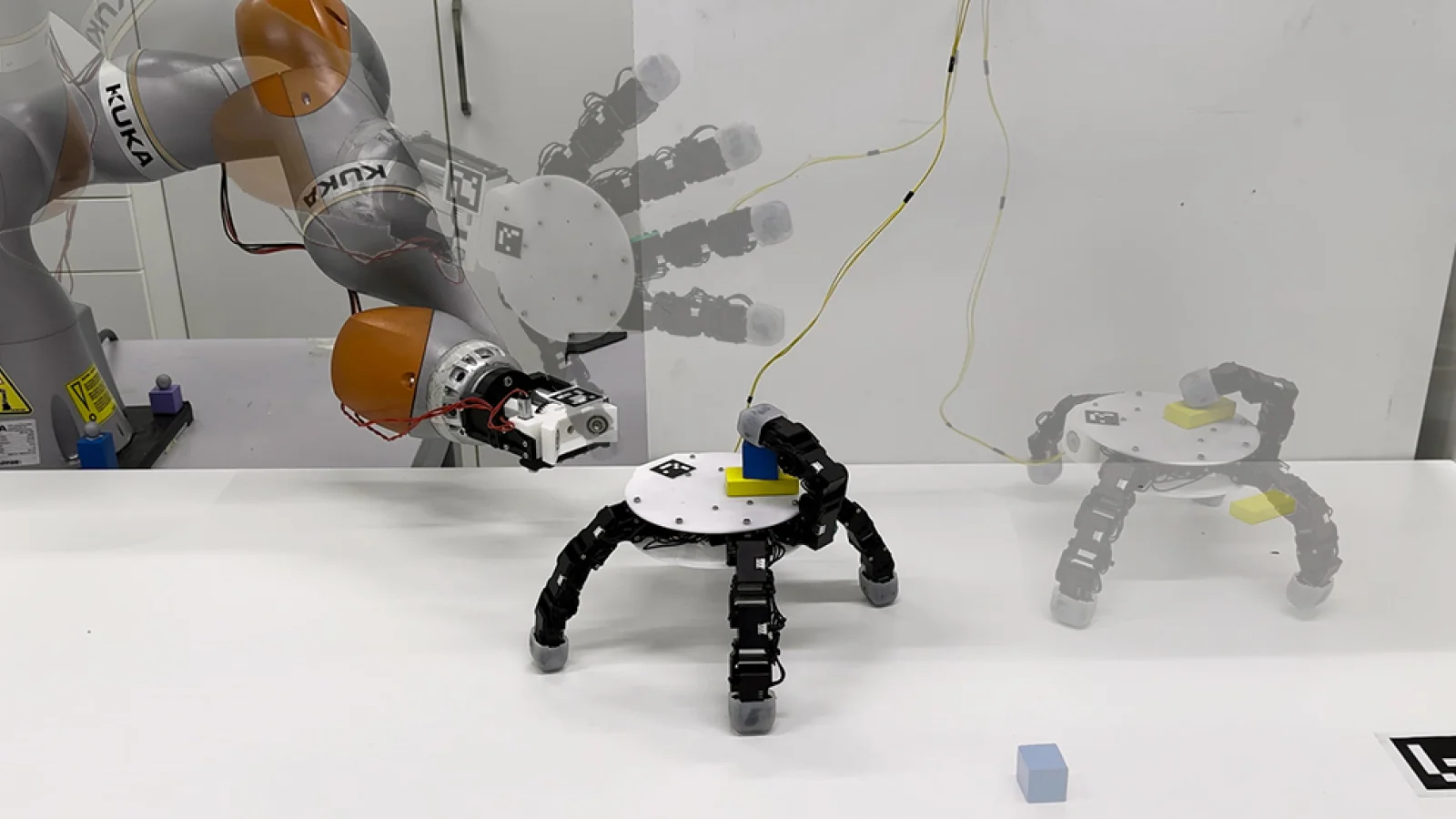
Detachable Crawling Robotic Hand Fetches Objects and Reattaches
EPFL researchers have built a self-contained, detachable crawling robotic hand that can grip multiple objects (up to four), move to retrieve items from tight or hazardous spaces, and reattach to its arm using a snap-and-lock system. With bidirectional fingers and magnets guiding reattachment, the device combines manipulation and locomotion and could inform future prosthetics and specialized environments.