"CMU Researchers Boost Policy Learning by 20% with AI-Enhanced Distance Learning for Robotics"
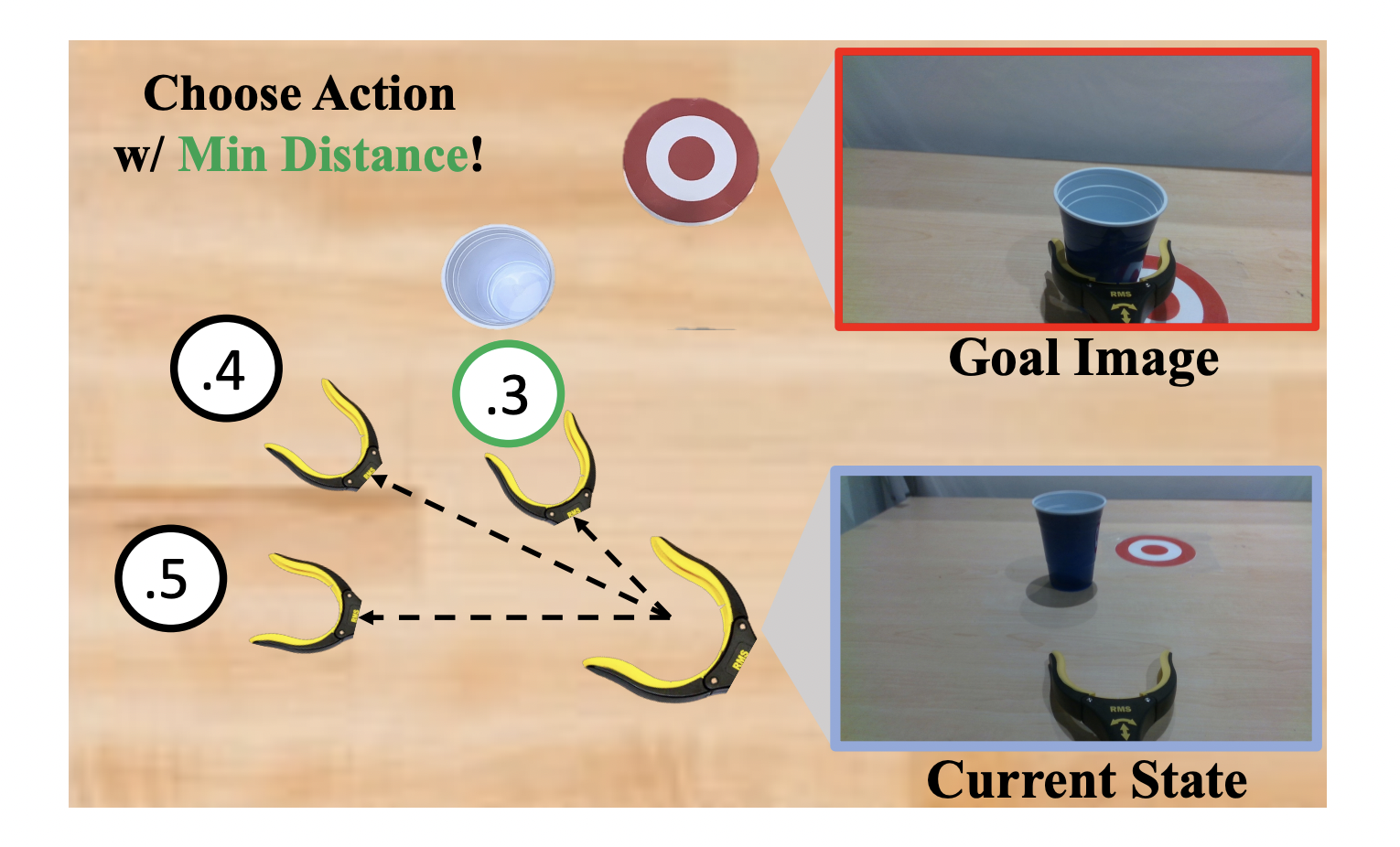
Researchers from Carnegie Mellon University have developed a method that uses pre-trained neural picture representations to improve policy learning in robotics tasks. By splitting the representation into two modules - a one-step dynamics module and a functional distance module - the researchers were able to infer robot movements and learn a distance function with minimal human data. The proposed system outperformed traditional imitation learning and offline RL approaches, showing better control performance and scalability. The team hopes their work will inspire further research in robotics and representation learning.