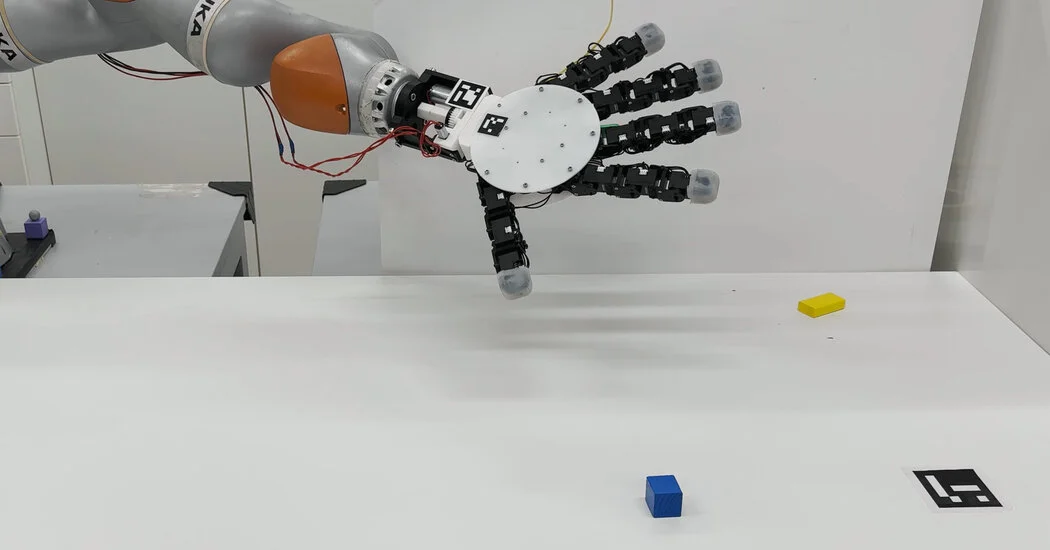
Researchers at ETH Zurich demonstrated a detachable, thing-like robotic hand that can grasp objects from both sides, roam freely, detach from its arm, and later return to reattach, enabling versatile manipulation and easing tasks that rely on human grip.
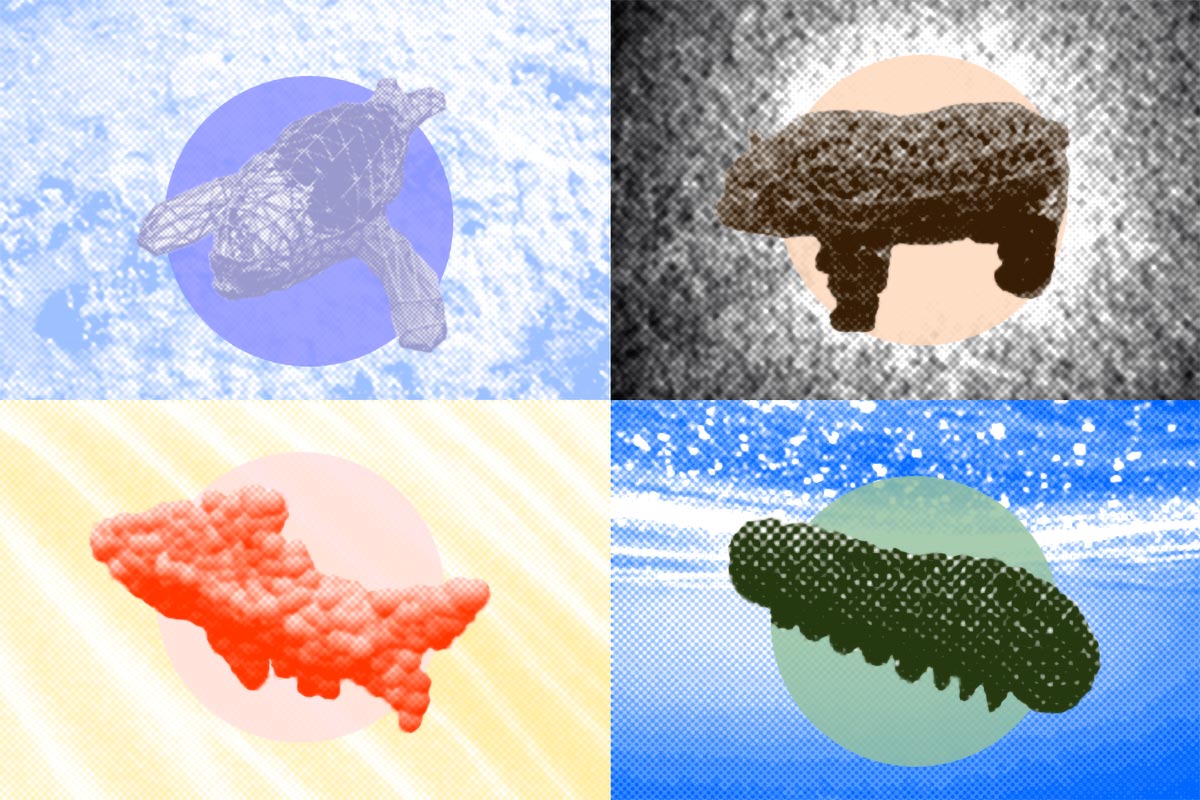
Researchers at MIT have developed SoftZoo, an open-source platform for soft robot co-design that simulates wildlife to optimize robot design and control. The platform features 3D models of animals such as panda bears, fishes, sharks, and caterpillars, allowing engineers to study soft robot performance in different environments. SoftZoo's differentiable multiphysics engine enables the simulation of various physical systems, reducing the need for expensive simulations and enabling the design of more sophisticated algorithms. The platform's versatility and ability to simulate interactions with different terrains highlight the importance of morphology in machine design. SoftZoo has the potential to accelerate the development of customized soft robots for specific tasks and applications in human mechanics.