New 3D-printing method lets soft robots bend and grasp on command
TL;DR Summary
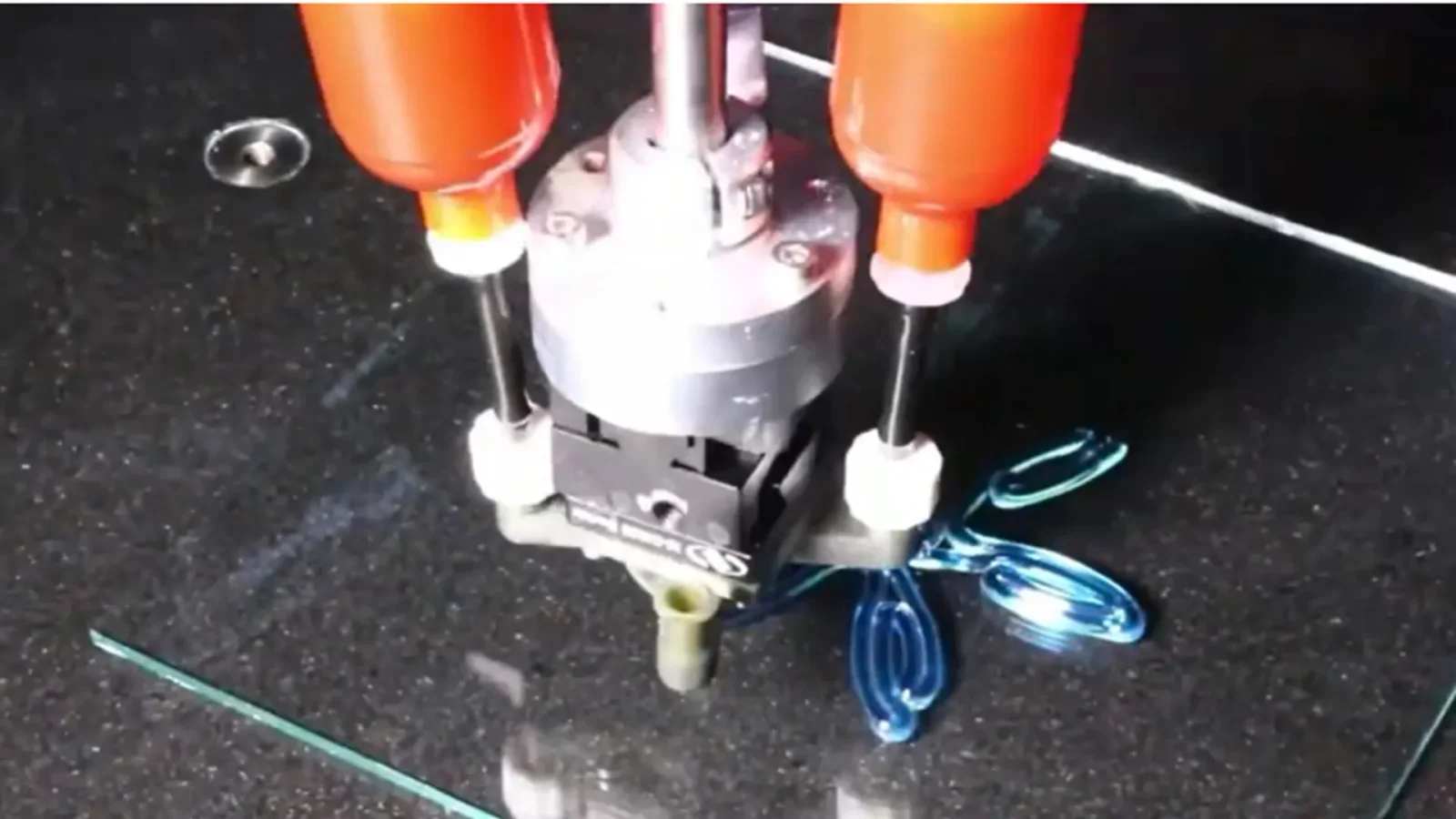
Harvard engineers embed motion directly into soft robots with a rotational multimaterial 3D‑printing process that creates hollow pneumatic channels inside flexible filaments. When inflated, these channels cause the structures to bend, twist, or grasp in preprogrammed ways, removing molds and assembly steps and enabling rapid design changes. Demonstrations include a flower-like actuator and a hand-shaped gripper, with potential applications in surgical robotics and delicate-object handling.
Topics:technology#3d-printing#ai-and-robotics#bio-inspired-robots#pneumatic-actuation#rotational-multimaterial-printing#soft-robotics
Soft robots can now be 3D printed to move exactly as designed Interesting Engineering
Reading Insights
Total Reads
1
Unique Readers
9
Time Saved
10 min
vs 11 min read
Condensed
97%
2,005 → 65 words
Want the full story? Read the original article
Read on Interesting Engineering